

It is generally believed that if the belt conveyor drive device configuration is too high, it is a waste of resources. However, for large equipment, if it is too low, it will cause the dynamic tension to increase when the belt is started, and even cause the belt to resonate. How to reasonably select the driving device is the key in the design of the belt conveyor. It is also a key issue in whether the design is reasonable, the operation is normal, and the maintenance cost and maintenance volume are low. This article analyzes the applications, advantages and disadvantages of several common driving methods for reference.

1. Electric roller
Electric drums are divided into built-in electric drums and external electric drums. The main difference between them is that the motor of the built-in electric drum is installed inside the drum, while the motor of the external electric drum is installed outside the drum and is rigidly connected to the drum.
The built-in electric drum has poor heat dissipation because the motor is installed inside the drum. It is generally used on belt conveyors with a power of less than 30kw and a length of less than 150m. Because the motor is installed outside the drum, the external electric drum has better heat dissipation. It is generally used on belt conveyors with a power of less than 45kw and a length of less than 150m.
Advantages: compact structure, low maintenance costs, high reliability, the driving device and the transmission roller are integrated into one.
Disadvantages: Poor soft start performance, large impact on the power grid when the motor starts. The reliability is worse than the Y-type motor + coupling + reducer drive method.
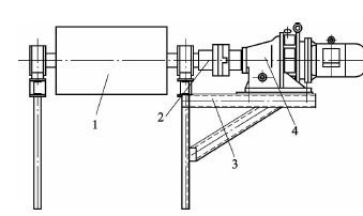
2. Poor driving mode of Y-type motor + coupling + reducer
Advantages: simple structure, small maintenance workload, low maintenance costs and high reliability.
Disadvantages: Poor soft start performance, large impact on the power grid when the motor starts. Generally used on belt conveyors with a power of less than 45kw and a length of less than 150m.
3. Y-type motor + torque limiting fluid coupling + reducer
It is a widely used driving device on belt conveyors, which is generally used in belt conveyors with a single power of less than 630kw and a length of less than 1500m.
The rectangle-limiting fluid coupling is divided into a rectangle-limiting fluid coupling with the rear auxiliary chamber and a rectangle-limiting fluid coupling without the rear auxiliary chamber. Because the former slowly enters the working cavity of the fluid coupling through the throttle hole through the rear auxiliary chamber when the motor is started, its starting performance is better than that of the latter.
If the one with the rear auxiliary chamber is selected, when the two models of the fluid coupling can meet its transmission power, due to the long starting time and large heat generation of the fluid coupling, the larger type of fluid coupling should be preferred.
If the one without the rear auxiliary chamber is selected, when the two models of the fluid coupling can meet its transmission power, the smaller type of fluid coupling should be preferred because the starting time of the fluid coupling is short and the heat generation is small.
For belt conveyors driven by multiple motors, if this drive method is selected, it is recommended to choose a fluid coupling with rear auxiliary chamber torque limiting type fluid coupling.
Advantages: cost-effective, simple and compact structure, small maintenance workload, low maintenance cost, protection motor overload, when multiple motors are driven, the motor power can be balanced, the delay start can be divided into stations, and the impact on the power grid when the belt conveyor is started is reduced, the reliability is high, the price is low, and it is the preferred driving mode for belt conveyors with a length of less than 1500m.
Disadvantages: The soft start performance is poor, and it is not suitable for the belt conveyor to be used for the downward transportation belt conveyor, and the belt conveyor that requires the speed regulation function.
4. Y-type motor + speed-regulating fluid coupling + reducer
A commonly used driving method for large belt conveyors, which is generally used on long-distance large belt conveyors with a length of more than 800m.
Advantages: the structure is simple, the overload maintenance workload is small, the motor is started at no load, the motor is overloaded, when multiple motors are driven, it can be delayed to start, reduce the impact of the belt conveyor on the power grid when it starts, the reliability is higher, the soft start performance is better, and it has the start-up controllable performance, that is, the start-up time is controllable, the start-up speed curve is controllable, and the price is low.
Disadvantages: When the fluid coupling is started, because the oil volume change and speed change curve of the working cavity of the fluid coupling are non-linear and have the backwardness, the controllable dynamic response is slow, and it is difficult to do closed-loop control, and sometimes there is oil leakage. It is not suitable for downward conveyor belt conveyor, and belt conveyor with speed regulation function is required.

5. Y-type motor + CST drive device
Y-type motor + CST drive device is designed for belt conveyor by Dodge Company of the United States, with high reliability of mechatronics drive device, generally used in long-distance large belt conveyor with a length of more than 1000m.
Advantages: good soft start performance, linear and controllable speed curve when starting, speed curve controllable when parking, closed-loop control can be done, motor no-load start, simple structure, small maintenance workload, when multiple motors are driven, it can be delayed to start in stages, and reduce the impact of the belt conveyor on the power grid when starting.
Disadvantages: high requirements for maintenance workers and lubricating oil, high equipment price. It is not suitable for downward conveyor belt conveyor, and belt conveyor with speed regulation function is required.
6. Winding motor + reducer
There are three control modes of winding motor + reducer:
The first type: wound motor string frequency resistor or water resistance;
There is no speed regulation function, and the motor can not be started frequently, generally used in the belt conveyor with a length of more than 500m and the motor does not start frequently.
The second type: wire-wound motor string metal resistor;
There is no speed regulation function, but the motor can be started frequently, and after braking with thyristor power, it is a common driving method for downward belt conveyors.
The third type: cascade speed regulation of winding motor.
It has the function of speed regulation, can be used for closed-loop control, and is generally used in large belt conveyors with a long distance of more than 1000m and a speed regulation function.
Advantages: the first and second control methods, simple structure, small maintenance workload, good soft start performance, low price, small impact on the power grid when starting, high reliability, good controllable performance; The third control mode has excellent power braking performance.
Disadvantages: the first and second control modes have large energy consumption when starting and stopping; The third control mode system is complex, and there is a tendency to be replaced by an alternating frequency or alternating frequency.
7. High-speed DC motor + reducer
A drive mode with speed regulation function, which is generally used in large belt conveyors that require speed regulation function.
Advantages: good soft start performance, linear controllable speed curve during starting, linear controllable speed curve when parking, good electrical braking performance, stepless speed change, excellent controllable performance, can do closed-loop control, high reliability.
Disadvantages: the price is very expensive, the thyristor rectifier system is complex, the electronic control equipment covers a large area, the power factor is low, the DC motor has slip rings, the brush wear is large, the maintenance workload is large, there is no explosion-proof type at present, and it cannot be used in coal mines.

8. The low-speed DC motor directly drives the drive roller of the belt conveyor
A driving mode with speed regulation function is generally used on a large belt conveyor that requires a speed regulation function and a belt conveyor with a single motor power greater than 1000kw.
Advantages: excellent soft start performance, linear controllable speed curve when starting, linear controllable speed curve when parking, good electrical braking performance, stepless speed change, excellent controllable performance, closed-loop control, no reducer, high reliability.
Disadvantages: the price is very expensive, the thyristor rectifier system is complex, the electronic control equipment covers a large area, the power factor is low, the DC motor has slip rings, the brush wear is large, the maintenance workload is large, and the current high-power non-explosion-proof type cannot be used in the coal mine.
9. Frequency conversion speed regulating motor + reducer
There are two control methods for frequency conversion speed motor + reducer:
The first type: intersecting and alternating frequency conversion
The power factor of the alternating frequency conversion system is low, and a large number of high-order harmonics will be generated during start-up and operation, which will cause pollution to the power grid. The frequent start of the motor will also cause a large reactive power impact on the power grid, which must be comprehensively managed. The investment in frequency conversion equipment is relatively low.
The second type: interchange has been an alternating frequency conversion
Due to the fact that the alternating frequency conversion system is equipped with a filter unit and a compensation unit in the device, the power factor is greater than 0.9, the higher harmonic component is very small, and it will not cause harmonic pollution, and there is no need to set up a harmonic absorption and reactive power compensation device, but the single power is greater than 2000kw The alternating frequency conversion system cannot be produced in China at present, and the equipment and spare parts must be imported, which is relatively high in the first investment. It is generally used in large belt conveyors that require speed regulation functions.
Advantages: excellent soft start performance, linear controllable speed curve when starting, linear controllable speed curve when parking, good electrical braking performance, stepless speed change, excellent controllable performance, closed-loop control, high reliability.
Disadvantages: the price is very expensive, the electronic control equipment covers a large area, the current single power is greater than 400kw non-explosion-proof type, can not be used in coal mines.
Through the above analysis of the advantages and disadvantages of various driving modes of belt conveyor, when selecting the drive device of belt conveyor:
For belt conveyors that do not need speed regulation and the length of the belt conveyor is less than 1500m, Y-type motor + torque limiting fluid coupling + reducer is its preferred driving mode, followed by winding motor + reducer (the control mode is the winding motor string metal resistance);
If the length of the belt conveyor is longer than 1500m, the Y-type motor + CST drive device is the preferred driving method, followed by the Y-type motor + speed-regulating fluid coupling + reducer.
In the case that the traffic volume of the belt conveyor changes greatly and the speed regulation is required, the frequency conversion speed regulation motor + reducer is its preferred driving method, followed by the cascade speed regulation + reducer of the winding motor.











